Pangkalahatang-ideya ng Programa
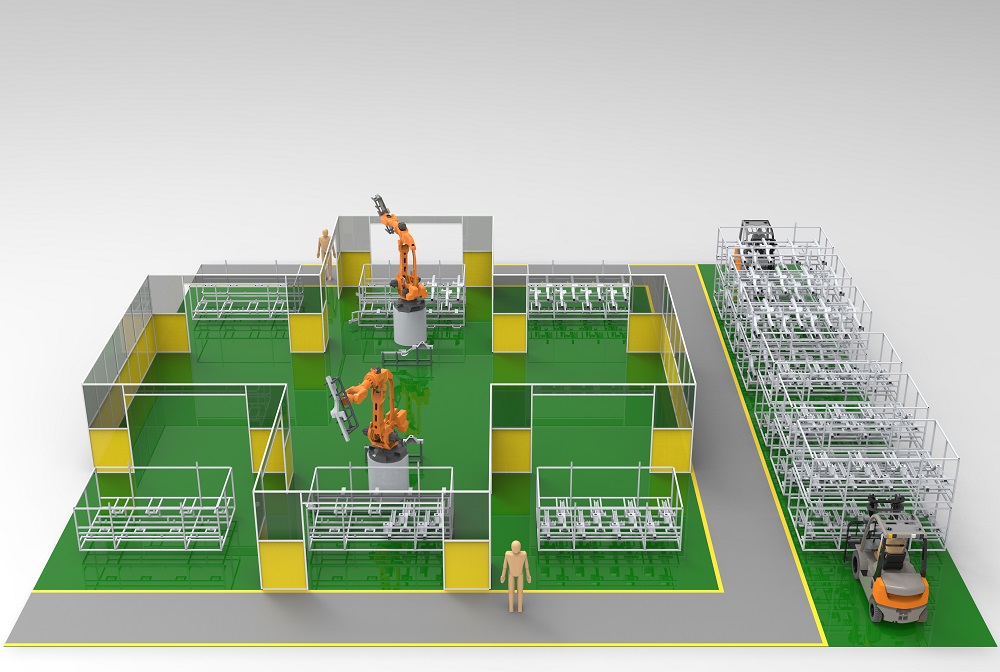
Ang pangunahing pag-andar ng linya ng produksyon: pag-crashworthiness ng riles sa harap ng sasakyan at linya ng produksyon ng pagpupulong ng wheel casing.
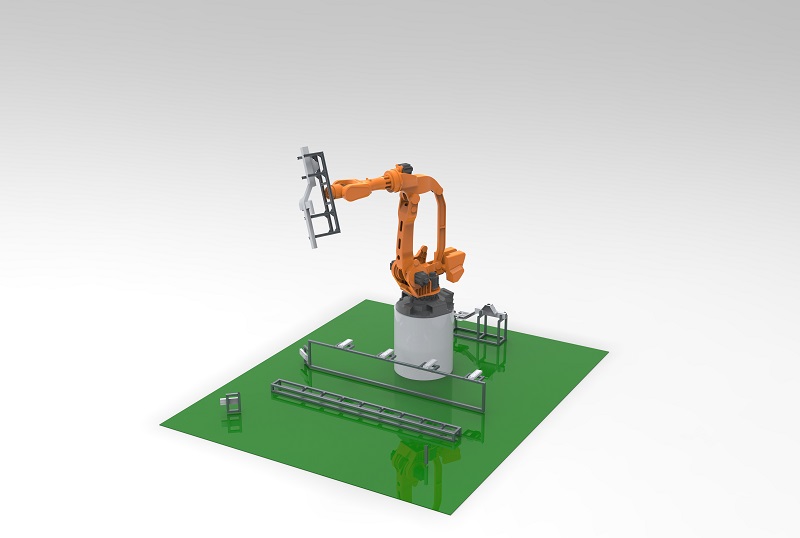
Proseso ng pag-assemble: ang bahagi ng kotse sa posisyon at subukan——ilagay ng robot ang bahagi—— HY1165A-290 kunin ang mga piyesa at ilagay ang mga ito sa mga piyesa ng kotse——Kapag puno na ang parking space, i-prompt ang staff na palitan ang mga piyesa.
Ang proyekto ay binubuo ng 2 set ng HY1165A-290, 2 set ng parking Space, 2 set ng grip at iba pang institusyon.
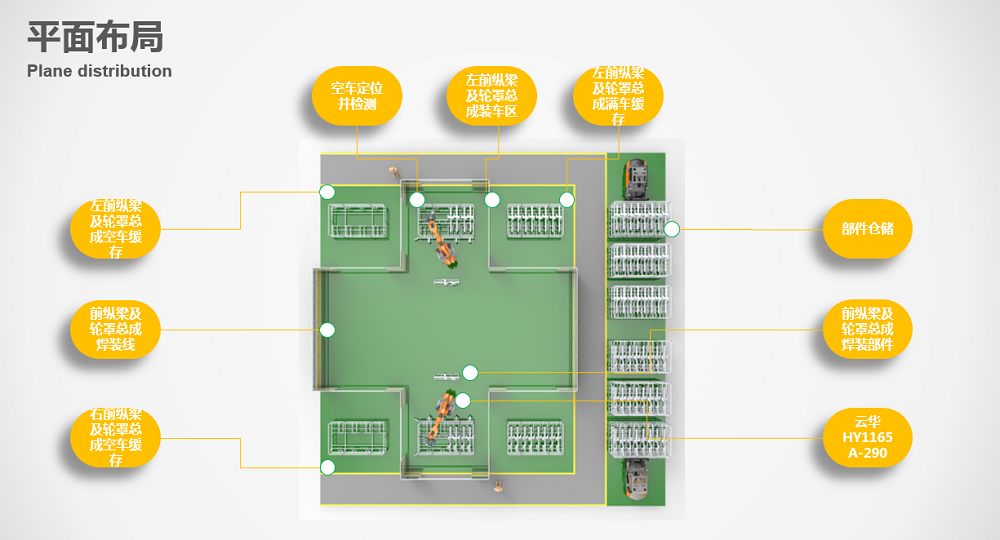
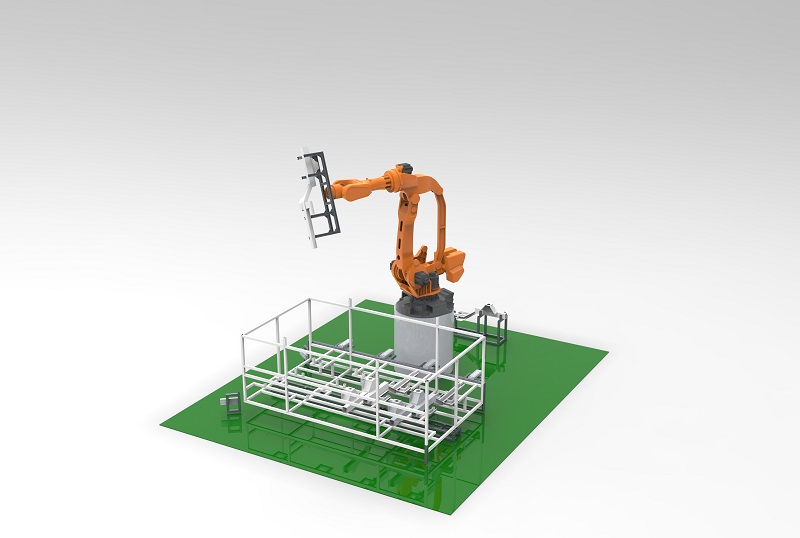
Proteksyon sa seguridad ng workstation, pagtukoy sa pagiging epektibo ng pagkakalagay ng bahagi, pagtukoy sa pagiging epektibo ng paghawak, pagtukoy ng walang laman na espasyo sa paradahan.
Component car positioning and detection, component car second floor material rack control, walang laman at full car control.



